Research
WaveFormer: Frequency-Domain Transformers for Medical Image Segmentation
▸ Key Publications
▸ WaveFormer: A 3 D Transformer with Wavelet-Driven Feature Representation for Efficient Medical Image Segmentation (MICCAI 2025)
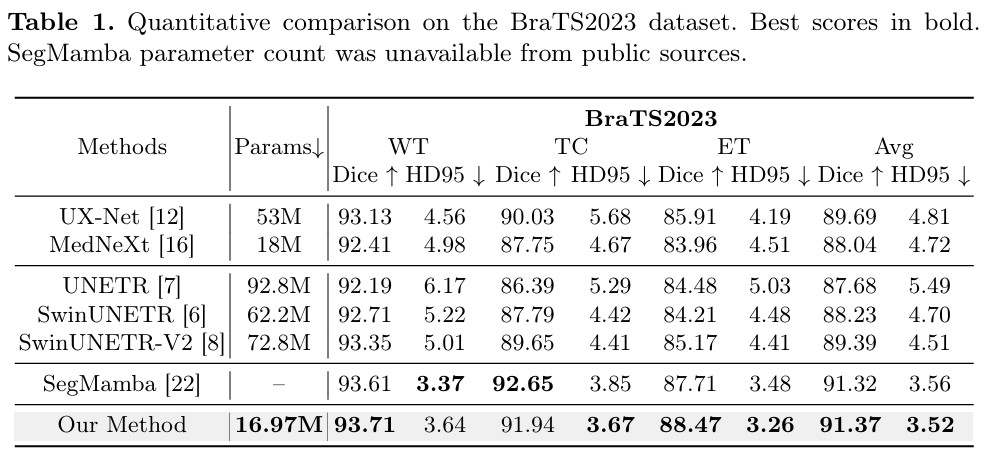
Introduces wavelet-guided attention that matches SOTA Dice on BraTS, FLARE, and KiTS with 80% fewer parameters.
paper
Overview
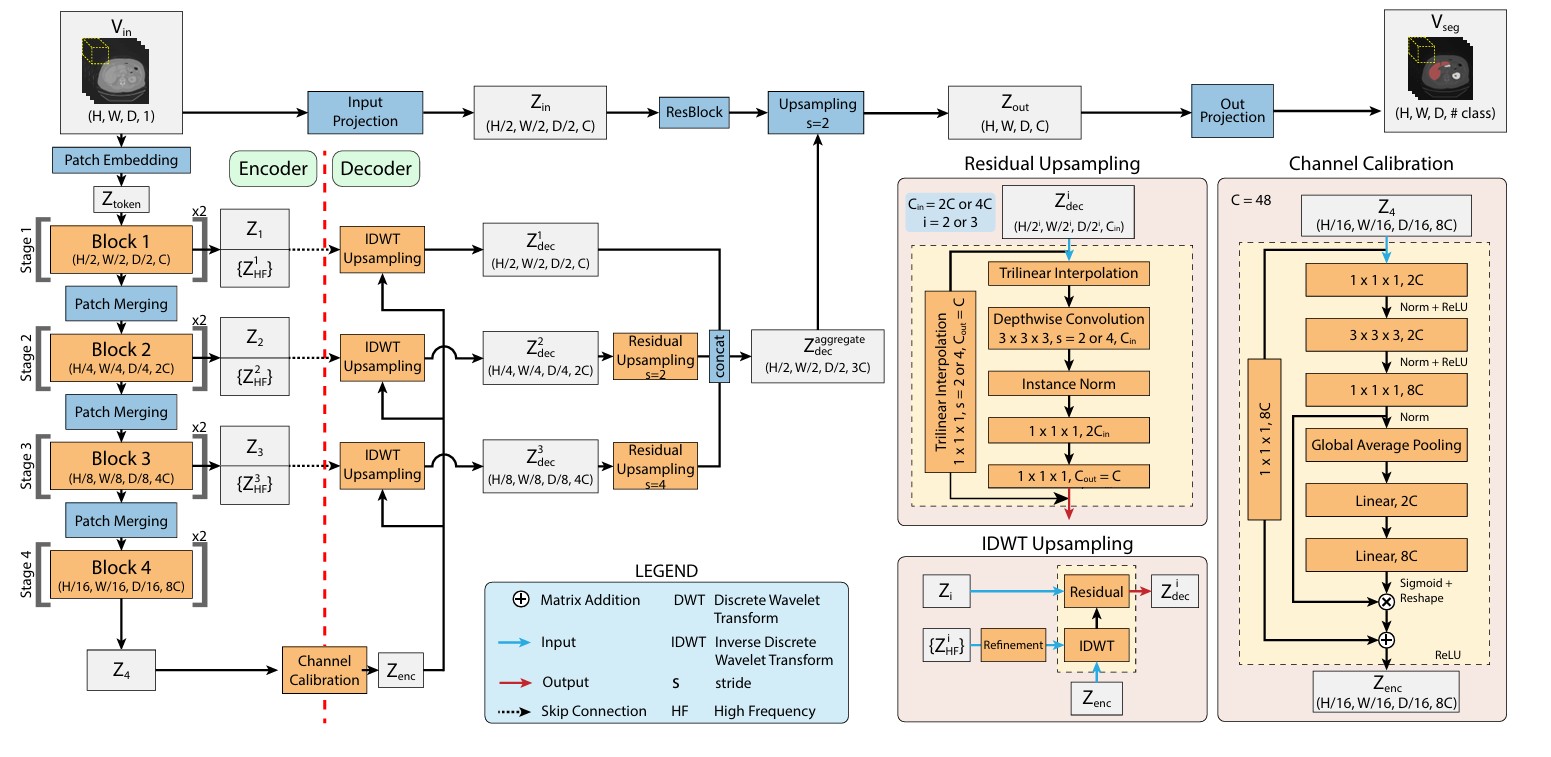
WaveFormer exploits discrete wavelet transforms to capture global context and fine detail in 3 D medical volumes while cutting parameter count and inference latency.
CogMod: Cognitive Modeling of Human Driving Behavior
▸ Key Publications
▸ CogMod: Simulating Human Information Processing Limitation While Driving (IV 2022)
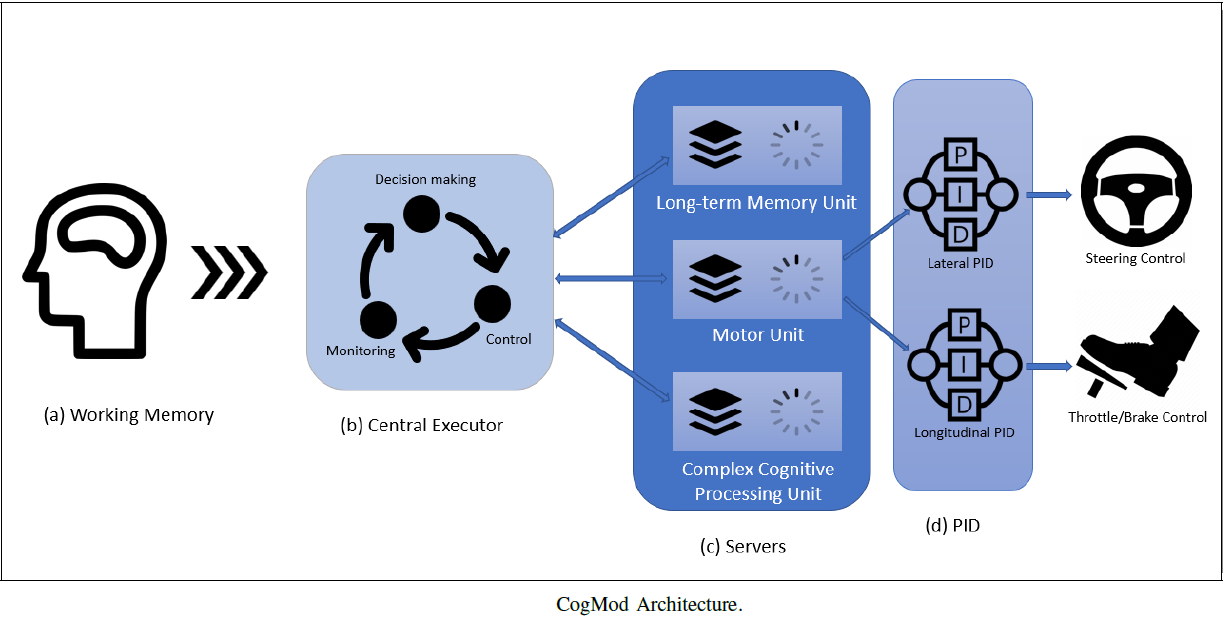
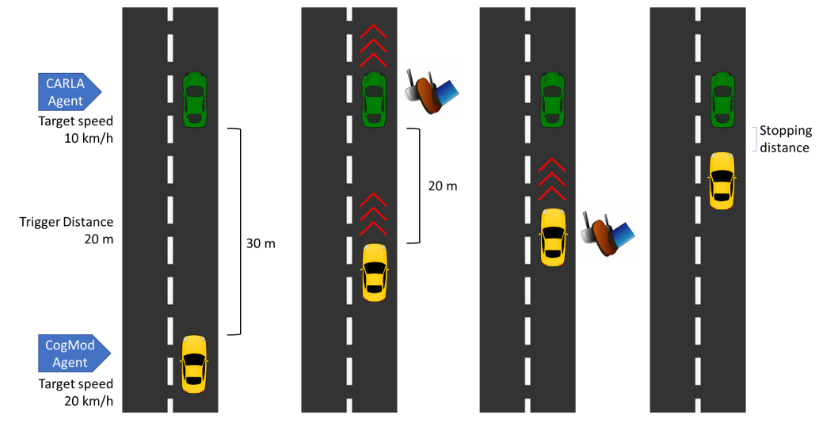
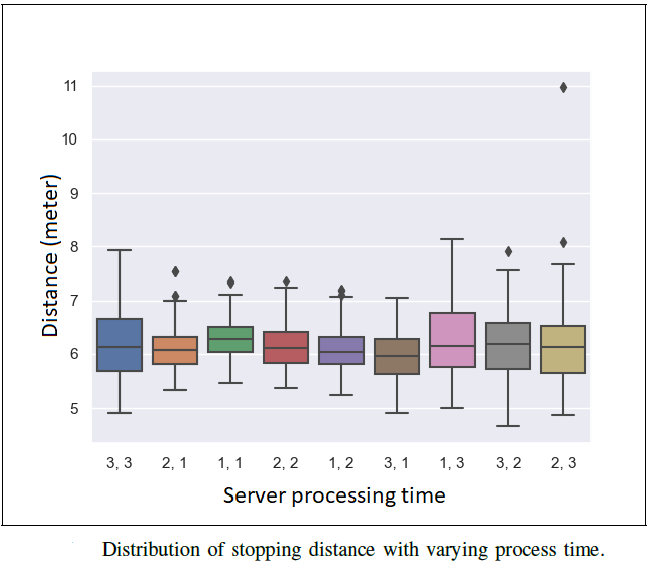
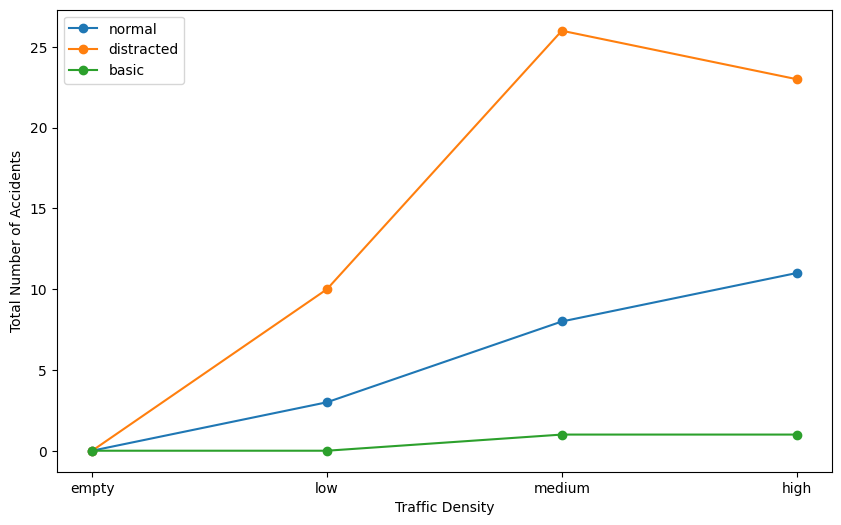
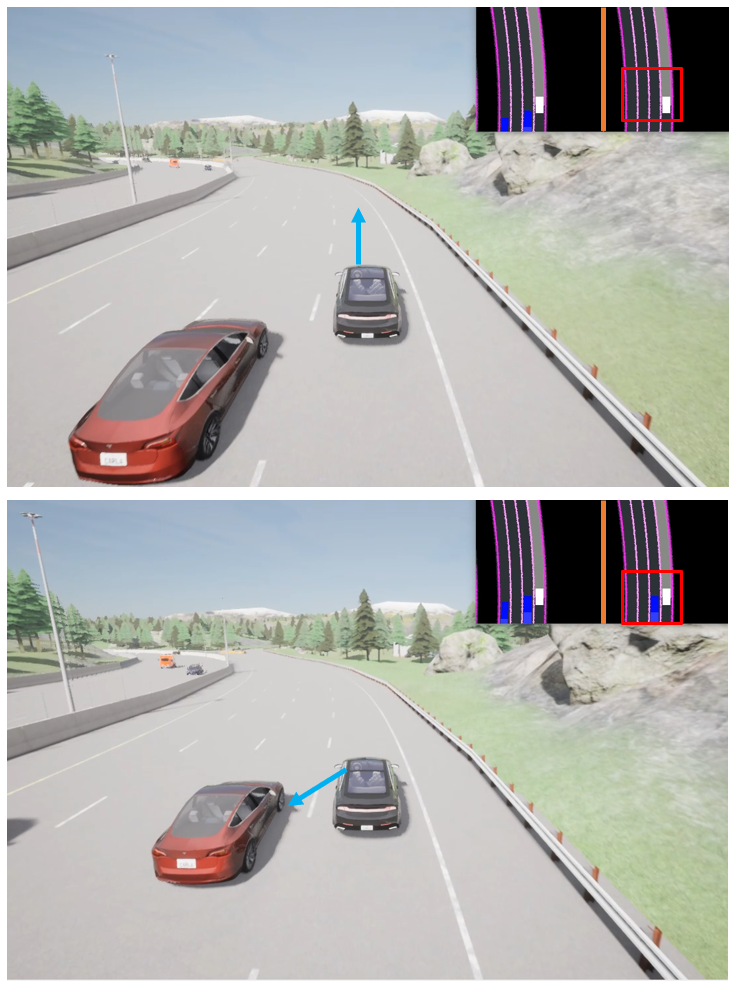
Embeds cognitive limits into CARLA to create nuanced accident scenarios and stress-test perception stacks.
github paper slide presentation
▸ CogMod: Driver Model for Augmenting Scenario Criticality (ITSC 2023)
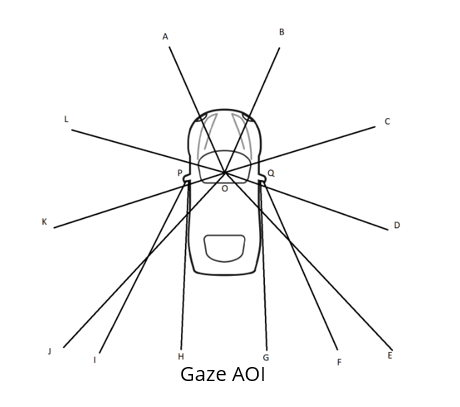
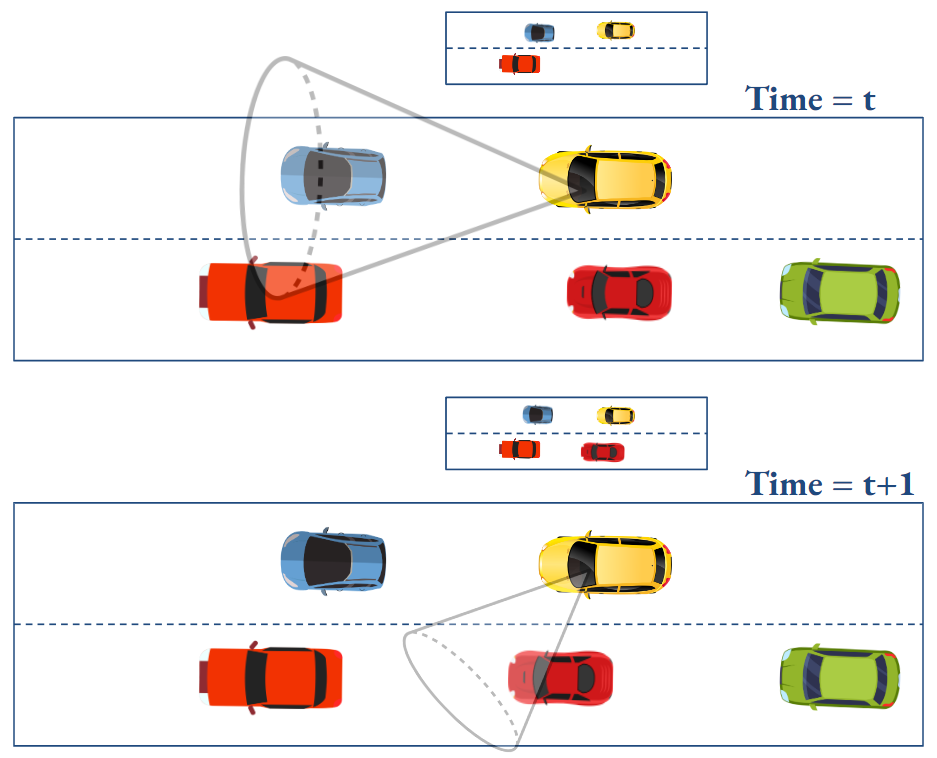
Adds gaze-modulated attention and rich internal state to diversify scenario criticality without sacrificing realism.
github paper slide
▸ Accident Scenario Generation using Driver Behavior Model (ITSC 2024)
Uses CogMod’s explicit perceptual-and-cognitive-limitation model to generate diverse accident scenarios for AV testing, showing how human limitations shape crash causation.
paper github
Overview
CogMod models attention limits, reaction time, and information decay to produce realistic accident scenarios for CARLA-based AV testing. The open framework underpins multiple IEEE ITSC papers.
JunctionArt: Procedural Road Network Generator
▸ Key Publications
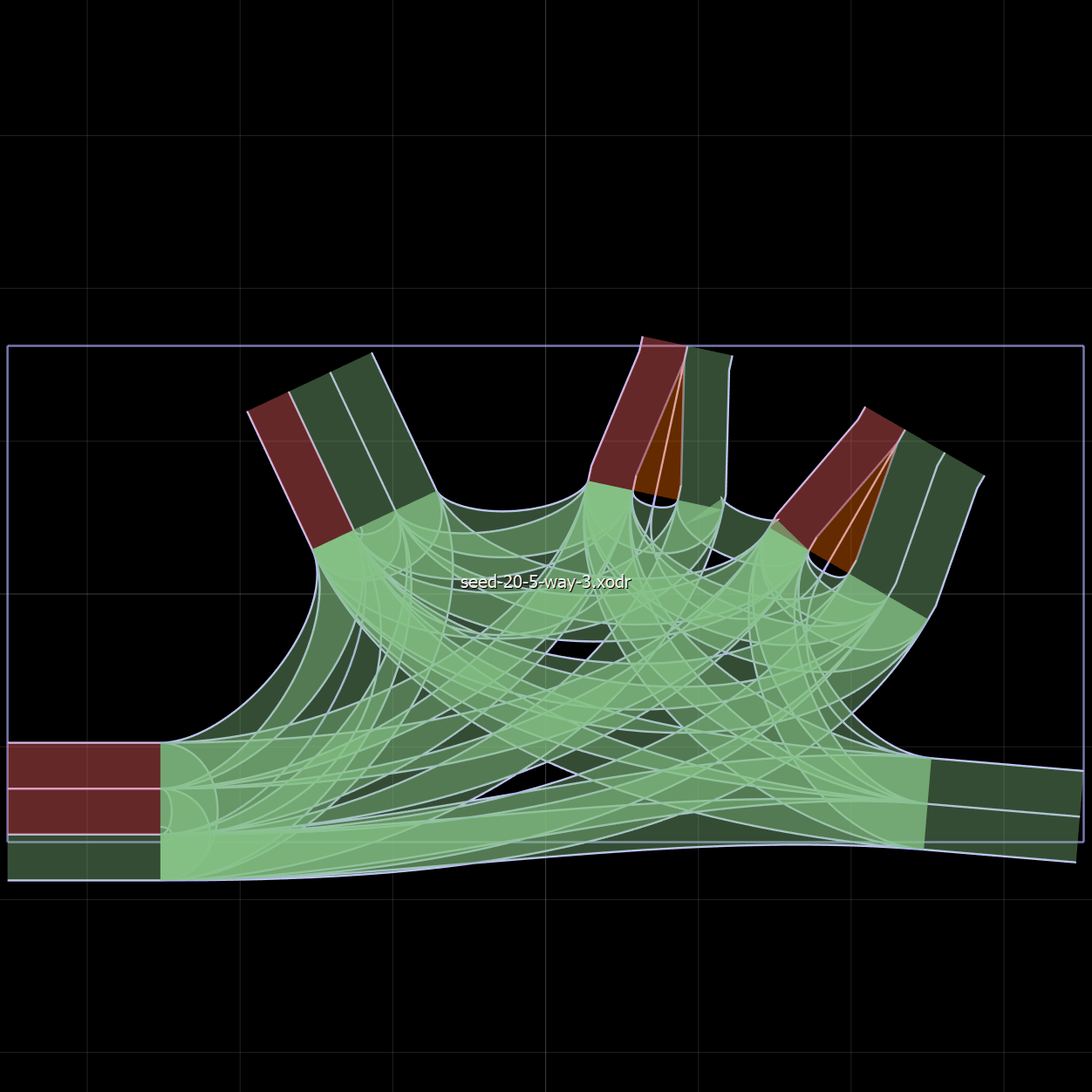
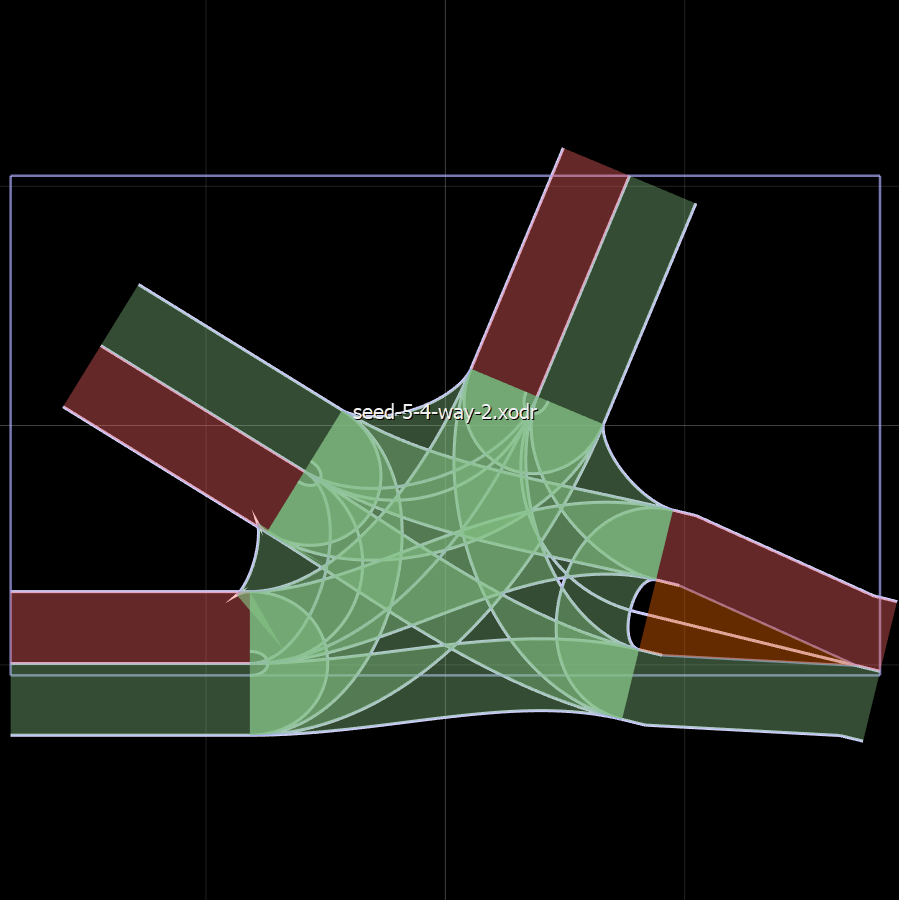
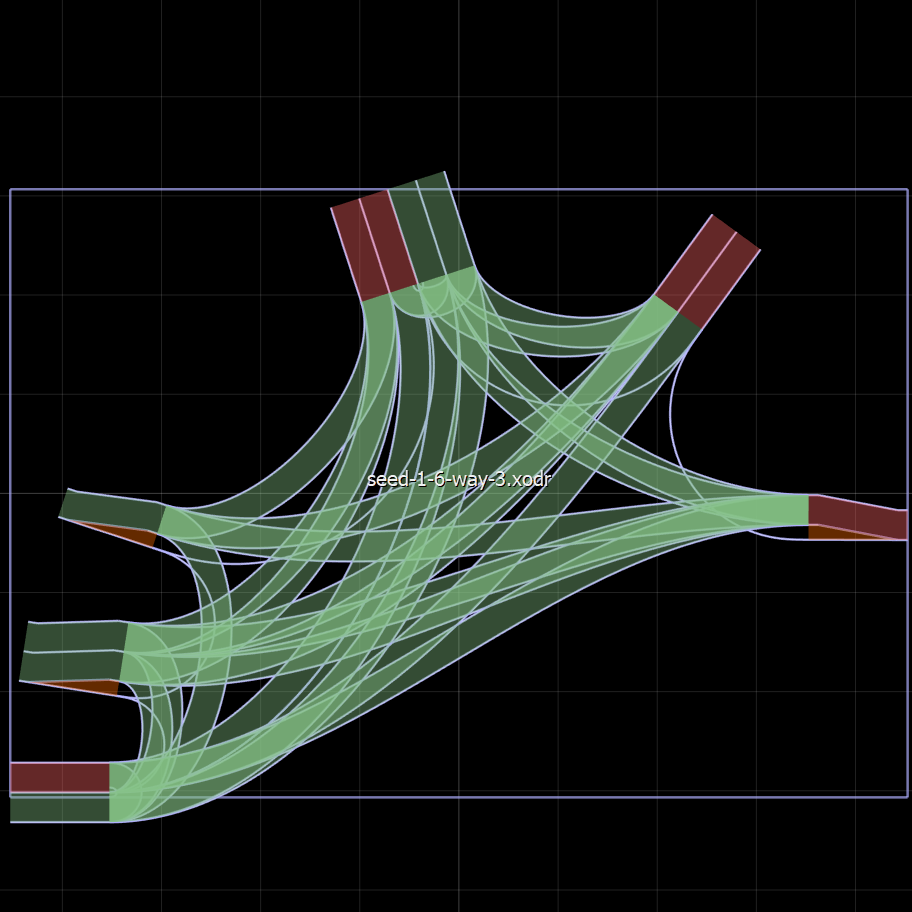
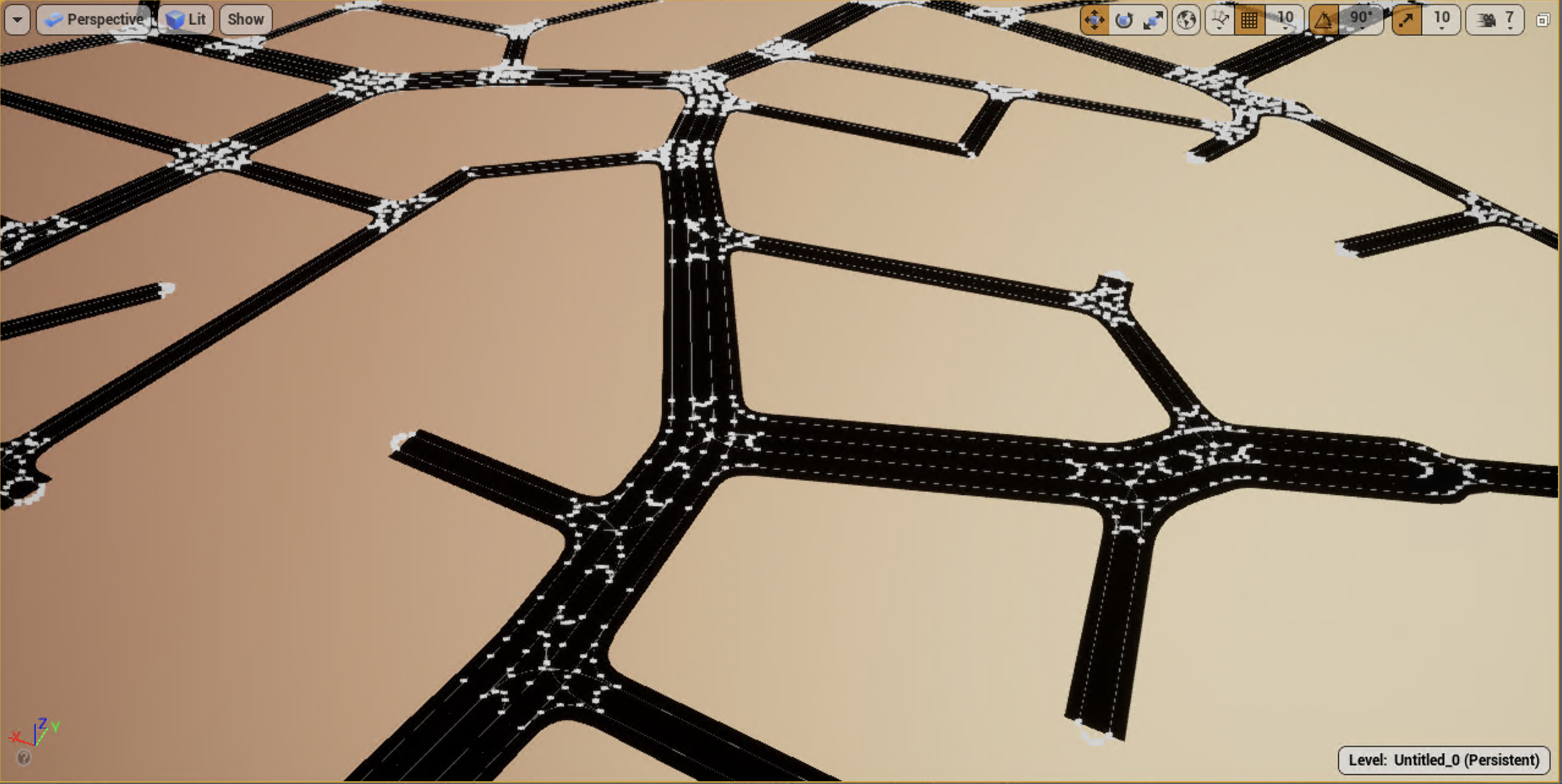
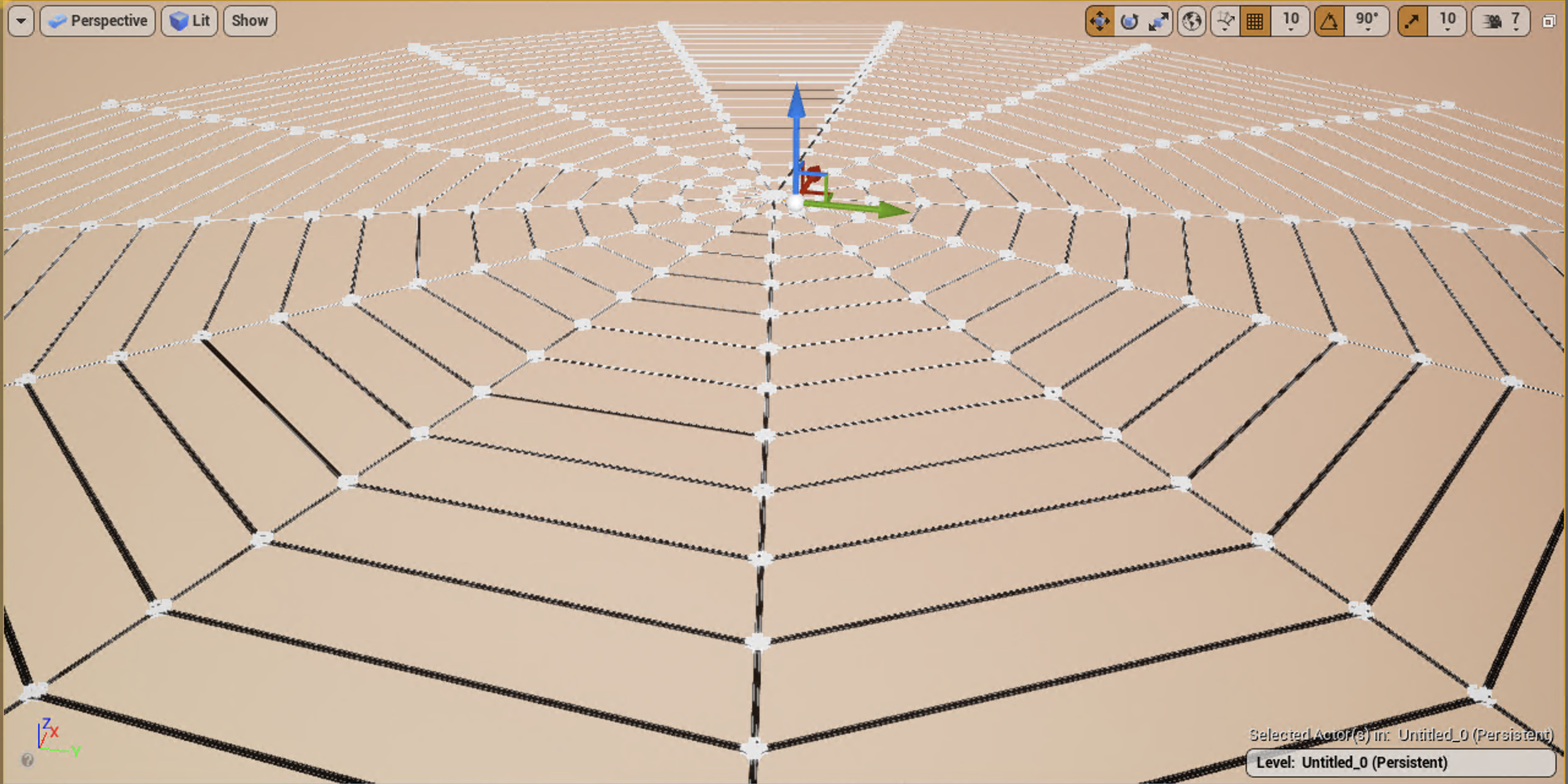
▸ Procedural Generation of High-Definition Road Networks for Autonomous Vehicle Testing and Traffic Simulations
Evaluates network expressiveness across curvature, FOV, and conflict metrics; published in SAE IJCAV 2023.
github paper
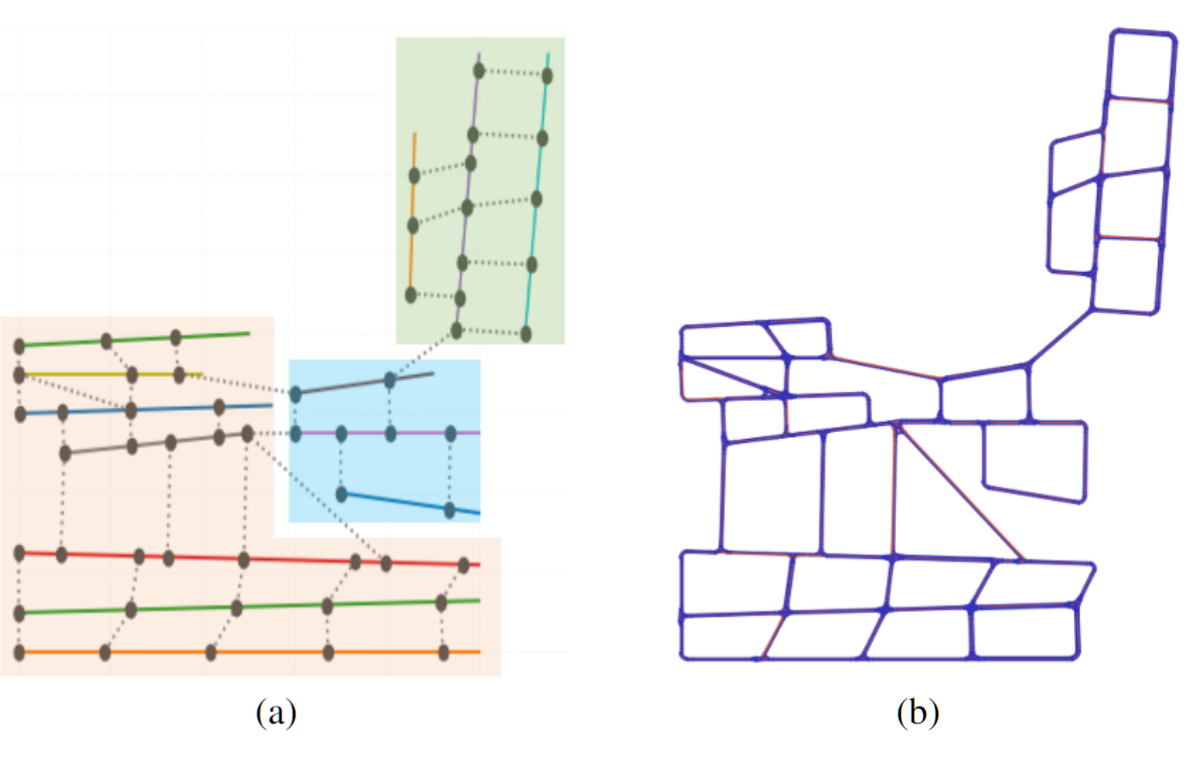
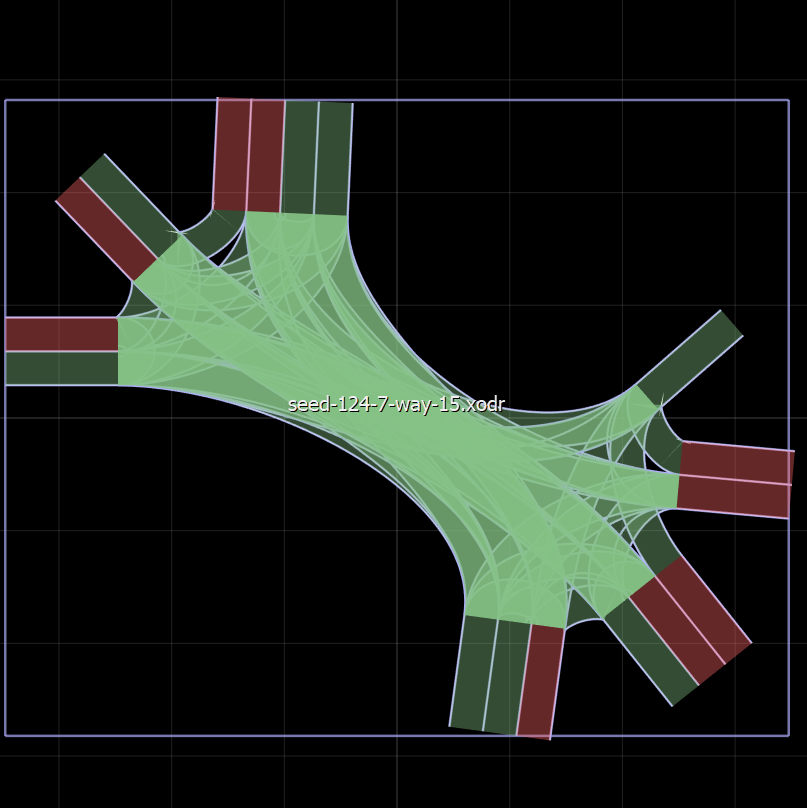
▸ Realistic Road Generation: Intersections
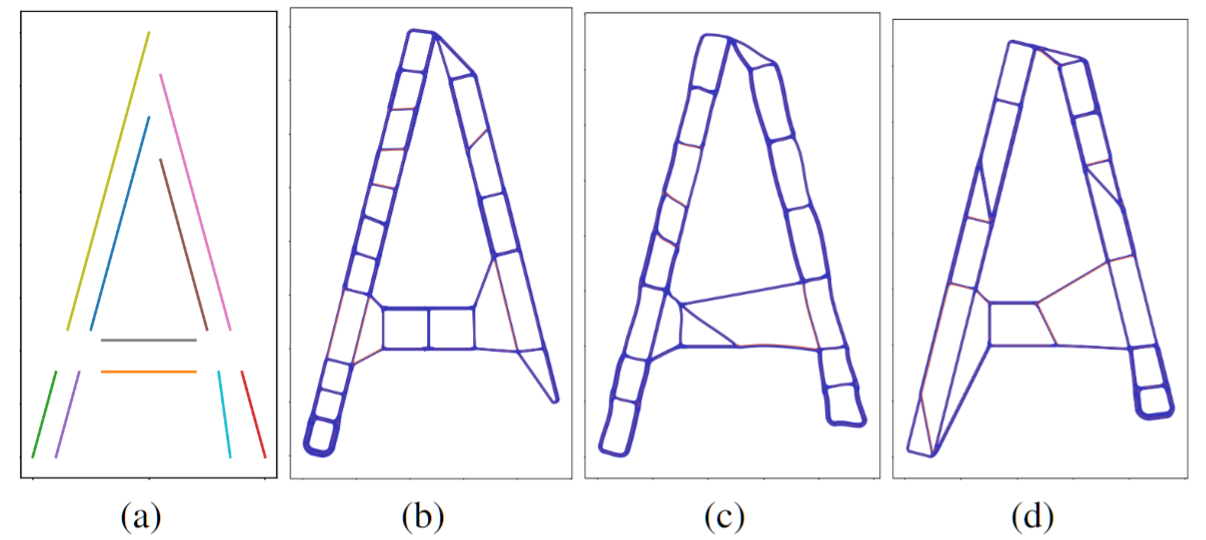
Presents helper-road techniques to author multi-leg intersections, validated against OpenStreetMap ground truth.
paper
Overview
Generates expressive OpenDRIVE road networks—including multi-leg intersections and roundabouts—for scalable AV testing across CARLA and SUMO.
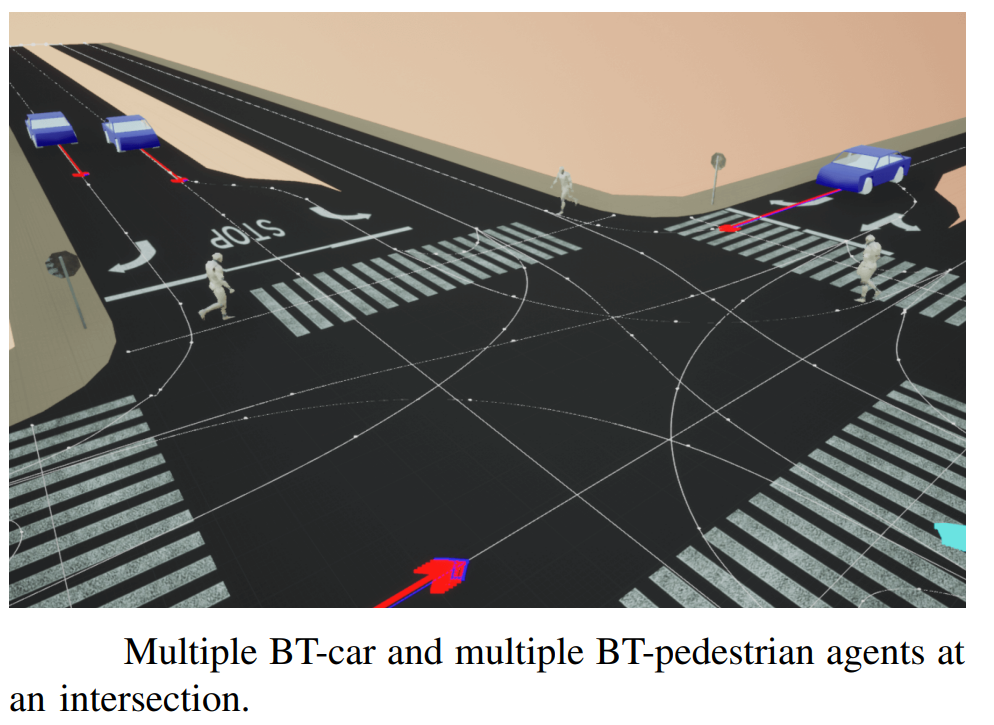
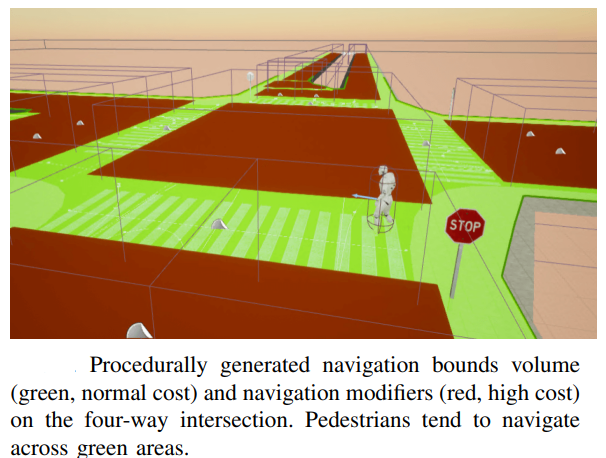
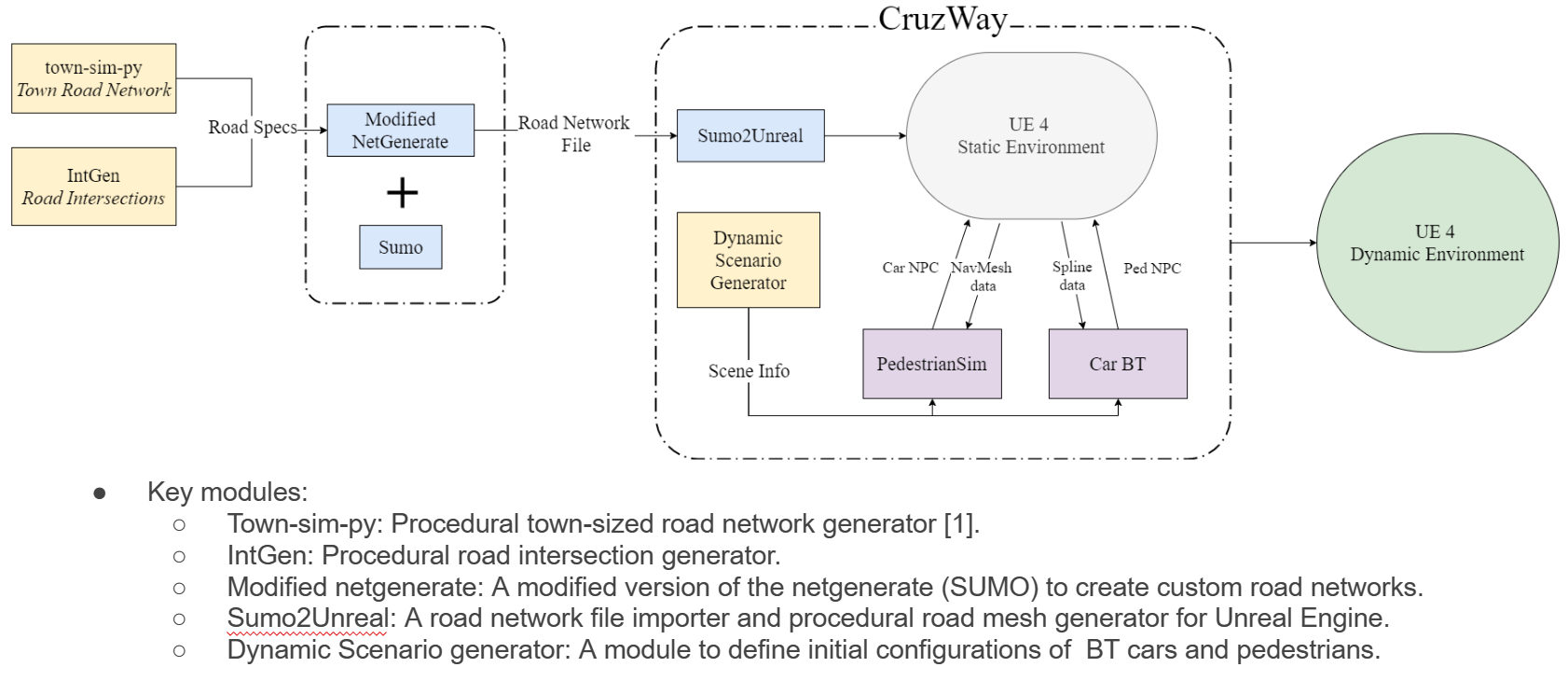
CruzWay: Modular AV Simulation Tool
▸ Key Publications
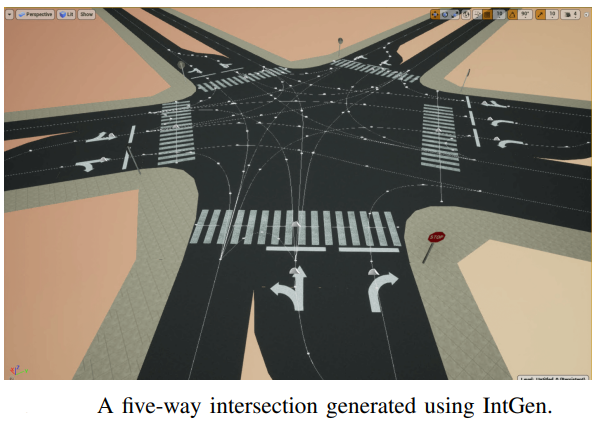
▸ CruzWay: A Modular Architecture for Generating Scenarios to Test Autonomous Vehicles
Combines Town-sim-py, IntGen, and SUMO2Unreal to automate scenario creation; presented at IEEE IV 2020.

github slide presentation
Overview
Converts SUMO layouts to Unreal meshes, spawns behaviour-tree agents, and orchestrates emergent critical scenarios—laying groundwork for later driver-behaviour projects.